Scientists in Bristol, England have demonstrated a prototype shape-shifting robot that deforms and moves under the influence of external electric fields, marking a noteworthy advance in soft robotics and electro-responsive materials research. The robot is constructed from a novel electro-morphing gel that reacts to changes in electric field configuration around it, rather than relying on conventional motors or rigid mechanical parts.
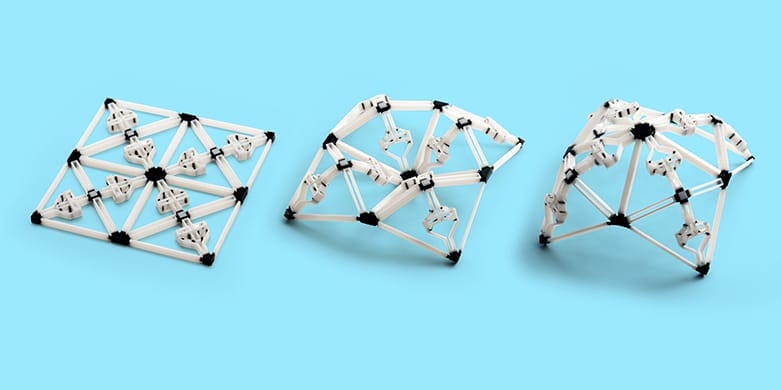
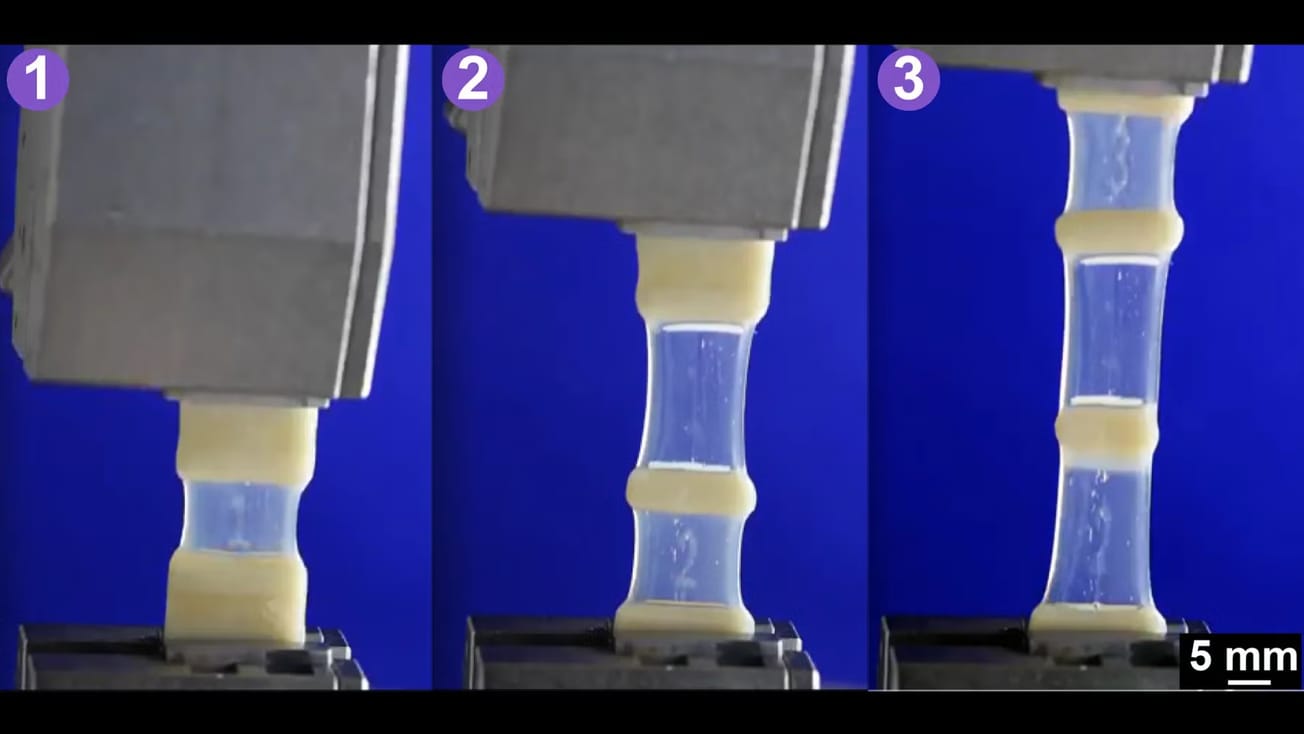
The prototype — visually likened to a “gymnast” during demonstrations — bends, stretches, twists and swings when electrodes around its body are energized in specific patterns. By altering the spatial distribution and intensity of these fields, researchers can prompt the material to undergo controlled deformations that translate into locomotion and shape change. This approach exploits the gel’s inherent material properties, which respond directly to electric forces rather than through intermediary mechanical linkages.
The development originates from work at the University of Bristol School of Engineering Mathematics and Technology, where engineers have been exploring how electro-responsive composites can be programmed to generate complex motion patterns. According to the report, the robot’s design leverages external electric field control to manipulate its morphology, rather than embedding actuators or circuitry within the body. This external actuation method simplifies the robot’s physical architecture but also highlights the challenge of integrating control systems for autonomous operation.
Shape-shifting robots like this prototype align with broader trends in soft robotics, where compliant structures and responsive materials replace traditional joints and rigid frames to enhance adaptability when interacting with unstructured environments. While practical applications remain exploratory, potential use cases include systems that must traverse confined or irregular spaces or interfaces that adapt dynamically to tasks without complex mechanical control layers.
The Bristol work underscores how material-centric design, paired with externally programmable fields, can expand how researchers think about robotic actuation and form modulation, particularly where conventional robotics faces limitations.

{kind=link}