
For most of the industrial era, movement in machines has depended on rigid structures and mechanical assemblies. Motors rotate shafts. Hinges define joints. Control systems coordinate the interaction of components. Soft robotics proposes a different model: movement emerging directly from the physical behavior of materials. Instead of rigid frames, soft robotic systems rely on elastomers, flexible polymers, hydrogels, and composite materials capable of bending, swelling, contracting, or deforming in controlled ways.
Geometry, material composition, and fabrication techniques encode behavior into the structure itself. In these systems, movement is not produced by mechanisms layered onto materials; it arises from the materials themselves. Soft robotics research sits at the intersection of robotics, materials science, and advanced fabrication. Researchers increasingly treat matter not as a passive substrate but as an active element capable of performing sensing, actuation, and limited forms of control.
Magnetic Matter and Remote Actuation
One of the most active areas of soft robotics research explores magnetic control of flexible materials. Scientists embed microscopic magnetic particles into elastomers or polymer matrices, allowing external magnetic fields to manipulate the resulting structures without onboard motors or rigid mechanisms. Roboticist Metin Sitti—formerly director of the Physical Intelligence Department at the Max Planck Institute for Intelligent Systems and now based at Koç University—has led influential research into magnetically actuated soft robots. These devices are typically fabricated from silicone or similar elastomer materials mixed with magnetic particles. When exposed to controlled magnetic fields, the robots can bend, crawl, roll, or swim through complex environments.
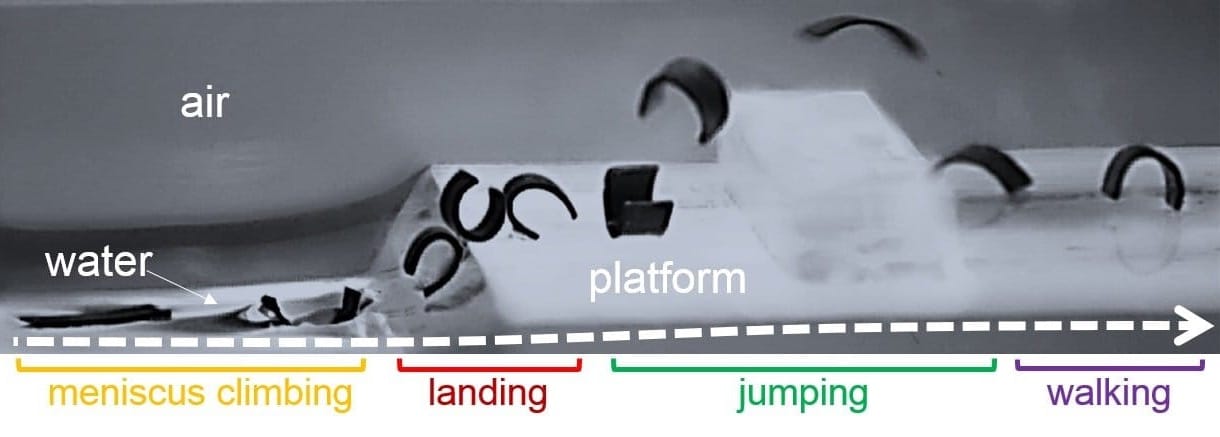
Research from Sitti’s group demonstrates millimeter-scale soft robots capable of navigating confined spaces and uneven terrain through externally applied magnetic fields. Because the robots do not require onboard motors or batteries, they can be fabricated at extremely small scales. The approach has attracted interest for potential medical applications such as targeted drug delivery or minimally invasive procedures, where small flexible devices must move through delicate environments. The significance lies less in the specific devices than in the design logic they represent. Actuation becomes a property of the material system itself. Magnetic particles distributed throughout a flexible structure allow movement to emerge through interaction with external fields rather than mechanical joints.
Synthetic Muscle and Liquid Crystal Elastomers
Another major direction in soft robotics research and materials science involves materials capable of contracting in response to energy input. Liquid crystal elastomers (LCEs) combine the molecular alignment properties of liquid crystals with the elasticity of polymer networks. When heated or illuminated, these materials contract along a programmed axis, producing motion analogous to biological muscle. Researchers including materials scientist Timothy J. White at the University of Colorado Boulder have developed LCE actuators that respond to light or heat. In these systems, thin polymer films are fabricated with aligned molecular structures. When exposed to stimuli such as infrared light, the material contracts and bends in predictable ways.
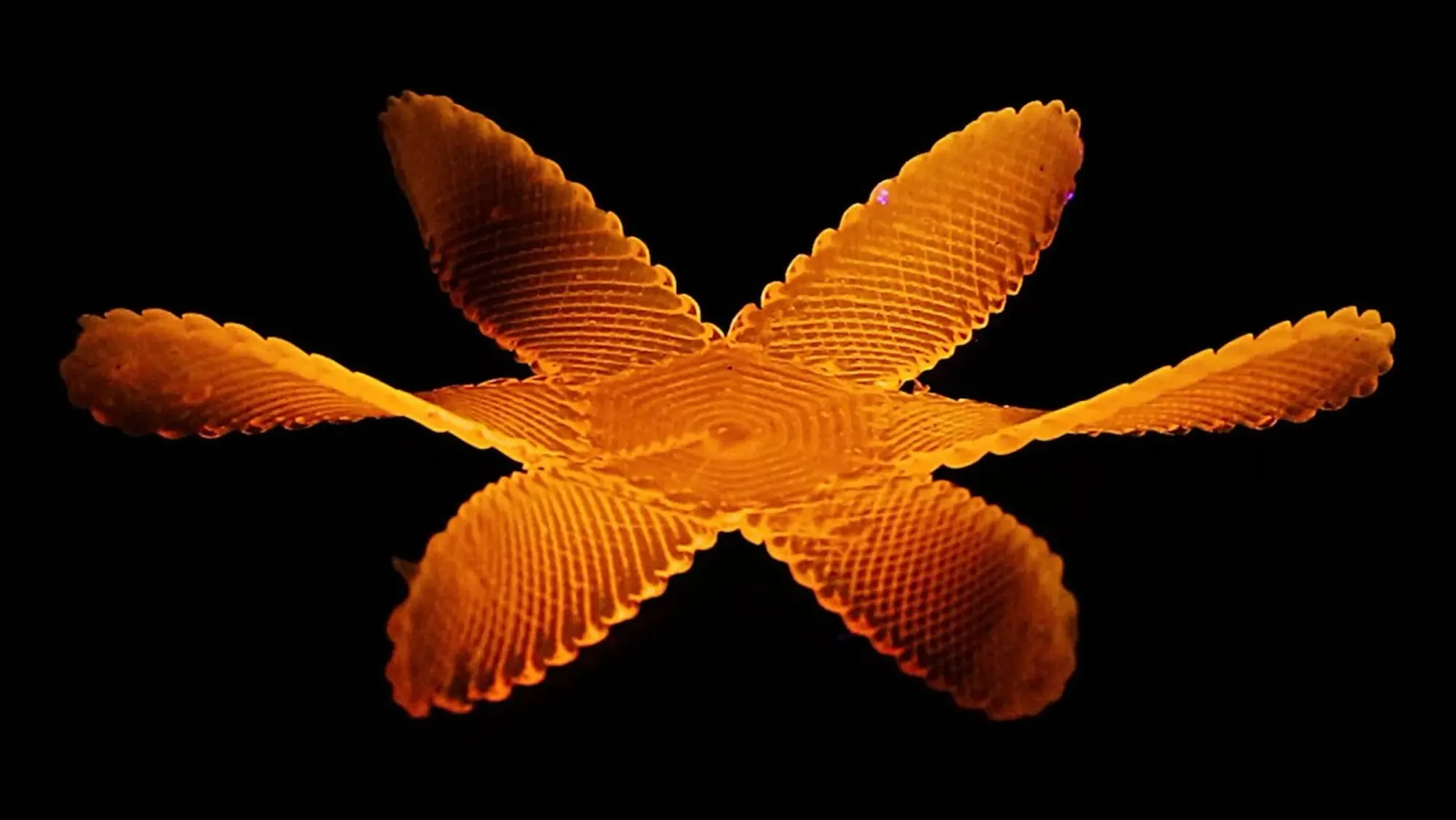
Because the movement is encoded in molecular orientation within the material, LCE systems can produce controlled deformation without mechanical components. Experimental prototypes have demonstrated soft robotic structures capable of locomotion and controlled shape change through photothermal activation. The appeal of LCEs lies in their efficiency and scalability. Instead of translating rotational motor output into linear motion through mechanical linkages, the material converts energy directly into movement. The resulting structures are lightweight, flexible, and capable of continuous deformation. These properties have made liquid crystal elastomers an important focus of research into untethered soft robots and adaptive structures that operate without rigid frames.
Morphing Materials and Fabricated Transformation
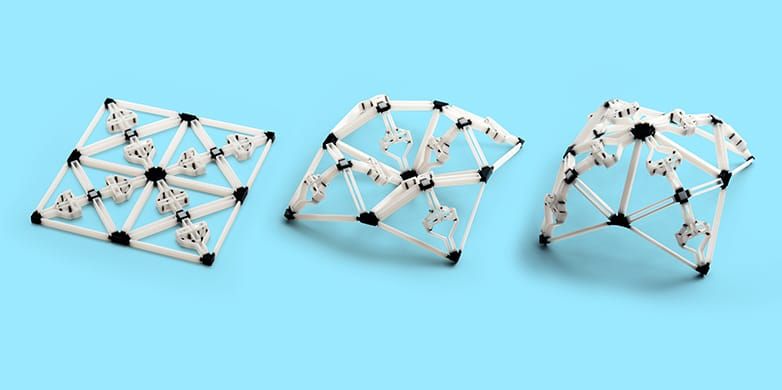
Soft robotics is not confined to robotics laboratories. Design researchers increasingly explore how fabrication techniques can encode transformation directly into materials. At the Morphing Matter Lab, directed by Lining Yao, research focuses on materials that change shape in response to environmental stimuli such as heat, moisture, or hydration. Projects from the lab investigate composite structures in which different material layers expand or contract at different rates. When exposed to a trigger, the resulting differential expansion causes bending, folding, or twisting. Examples include hydrogel composites that swell when exposed to water and thermally responsive materials that curve when heated. Because these transformations are defined by material composition and fabrication patterns, no electronic control system is required. The resulting behavior is effectively programmed during fabrication.
Image Credit: Morphing Matter Lab
This approach reframes fabrication as a form of programming. The geometry of layers, the orientation of fibers, and the distribution of material properties determine how the structure will respond when environmental conditions change.
Such systems have implications across product design, architecture, and robotics, where deployable or adaptive structures can emerge from material behavior rather than mechanical assemblies.
Soft Machines and Fluidic Logic
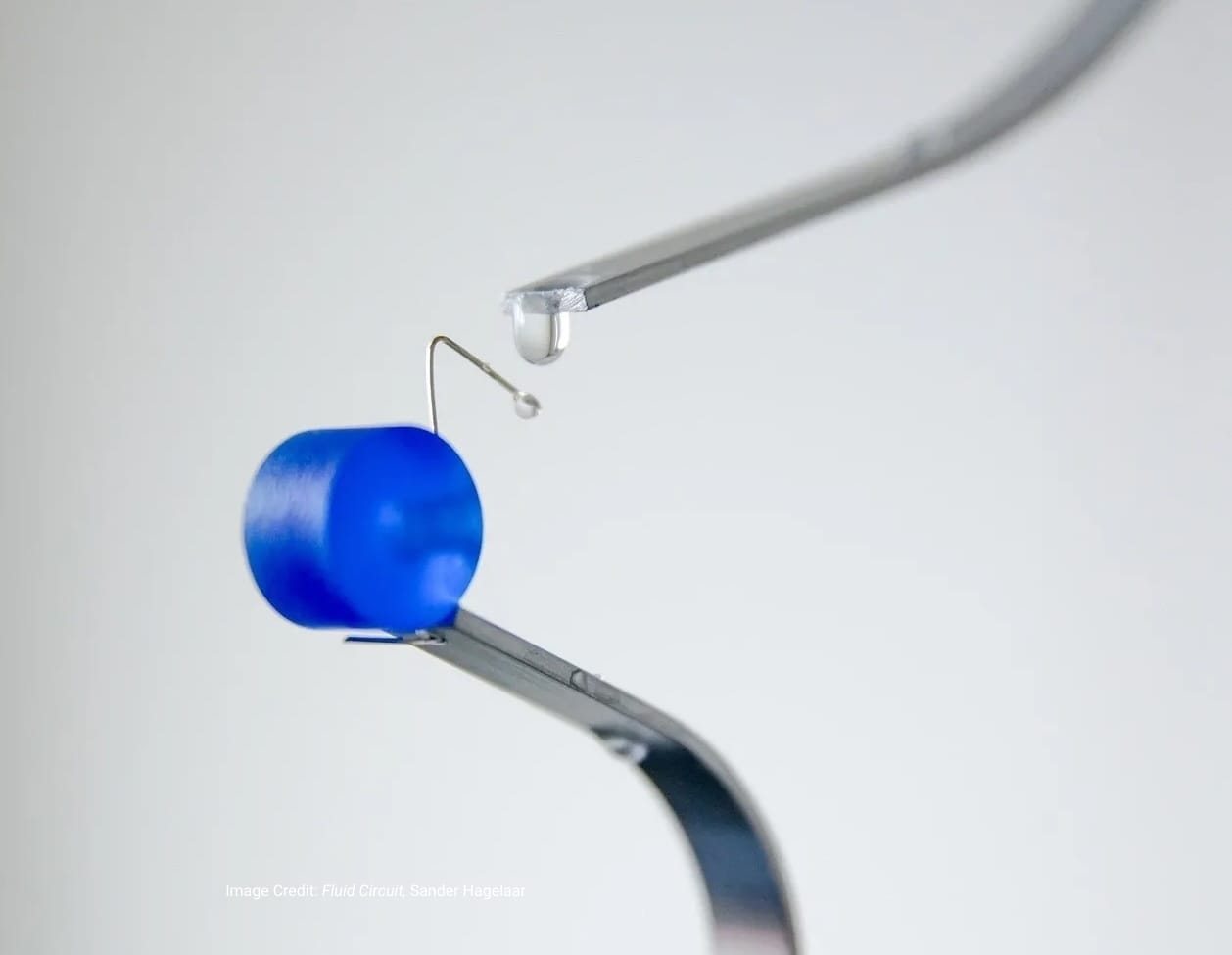
While some soft robotic systems rely purely on material deformation, others integrate flexible control architectures within the material itself. One example is the use of fluidic circuits—networks of microchannels embedded in elastomers that direct air or liquid pressure through a structure. Research at the Organic Robotics Lab at Cornell University, led by Rob Shepherd, explores soft robots that incorporate pneumatic networks and fluidic logic. In these systems, pressure changes propagating through microfluidic channels can trigger sequences of motion without electronic processors.
The approach builds on earlier research in fluidic computing, where air pressure rather than electrical signals performs logical operations. By embedding these channels directly into silicone structures, engineers can construct robots capable of simple control behaviors such as switching between movement patterns when encountering obstacles. The result is a hybrid system in which sensing, actuation, and control are integrated into a single flexible structure. Instead of assembling motors, sensors, and circuit boards into a rigid machine, the entire system can be fabricated as a continuous soft structure.
Soft robotics research remains a rapidly evolving field, but its broader implications are already visible. Across research labs and design studios, the boundary between materials and machines is beginning to dissolve. Motion can emerge from polymer alignment, magnetic particle distribution, or fluidic pressure networks. Behavior can be encoded through fabrication rather than software. As these approaches mature, the design of mechanical systems may increasingly resemble the design of materials themselves. Movement, sensing, and control become properties of matter rather than functions added through mechanical infrastructure. In that shift, machines begin to look less like assemblies of parts and more like responsive material systems.





{kind=link}